Разработки в области робототехники и встраиваемых систем.
Наименование
продукта
Краткая характеристика
Устройство для производства искусственных мышц из нейлоновой лески с нагревательным элементом
Целью проекта является разработка программно-аппаратной платформы
"Artificial Muscle Twister" для создания искусственных мышц из нейлоновой лески. Устройство собирается из
распространенных электронных и механических компонентов, корпус печатается на 3D-принтере.
Описание устройства и основные характеристики образцов мышц, созданных с его помощью и различающихся
исходным диаметром волокна и процессом изготовления, были представлены на симпозиуеме IEEE International
Symposium on Assembly and Manufacturing (ISAM), проходившего в рамках 12th Conference on Automation
Science and Engineering 2016, Fort Worth, Texas, USA.
Публикация: A. N. Semochkin, "A device for producing artificial muscles from nylon fishing line with a heater wire",
2016 IEEE International Symposium on Assembly and Manufacturing (ISAM), Fort Worth, TX, USA, 2016, pp. 26-30.
doi: 10.1109/ISAM.2016.7750715.
Предлагаемое устройство может быть применено в мелкосерийном производстве искусственных мышц для
дальнейших исследований и для практического использования. Электронные схемы, 3D модели и инструкции по сборке
выложены в открытый доступ и доступны по адресу: http://iskanderus.ru/amt-core
Данная работа выполняется в рамках исследований технологий человеко-машинных
интерфейсов в части способов организации взаимодействия пользователя с компьютерной системой на основе распознавания образов.
Автор и разработчик проекта:Сёмочкин Александр Николаевич
Обучаемый антропоморфный робот
Целью проекта является разработка программно-аппаратной платформы
антропоморфного робота с системой упрощенного программирования движений без использования инверсной кинематики, которая
основывается на принципах феномена моторной памяти.
Данная работа выполняется в рамках исследований технологий человеко-машинных
интерфейсов в части способов организации взаимодействия пользователя с компьютерной системой на основе распознавания образов. Для
исследований границ применимости разрабатываемых математических моделей в задачах человеко-машинных интерфейсов и моделирования
общих с человеком видов и форм коммуникации разрабатываются экспериментальные образцы антропоморфных роботов.
Главным преимуществом платформы являются сервоприводы,
которые вследствие модификации имеют обратную связь. Это существенно снижает себестоимость платформы, тем самым увеличивая ее доступность.
Корпус робота распечатан на 3D принтере. В качестве электронной составляющей робота использованы доступные платформы: Arduino Mega 2560, MultiServo Shiled.
Управление роботом осуществляется с помощью джойстика от Sony Playstation 2.
Джойстик имеет 17 кнопок и 2 аналоговых стика. Программное обеспечения робота имеет 3 режима управления: режим ручного управления; режим обучения; демо режим.
Каждый режим выбирается с помощью нажатия кнопки “SELECT”.
Запуск работы робота осуществляется при нажатии на кнопку “START”,аналогично происходит выключение.
С помощью аналоговых стиков в режиме ручного управления осуществляется управление руками (манипуляторами) робота.
На остальных кнопках, в зависимости от режима, назначена своя команда (алгоритм). Пример команд режима обучения (запись – набор характеристик сервоприводов,
которые впоследствии воспроизведет робот):
к первой записи
к последней записи
чтение записей
воспроизведение последней записи
начало записи движений
выбор записи; удаление всех записей
расслабление суставов
напряжение суставов
пролистывание записей назад
пролистывание записей вперед
Разработчик проекта:Коломыцын Евгений Александрович
Научный руководитель: А.Н.Сёмочкин
Протокол передачи данных на основе звуковых волн "звуковой штрих-код"
Звуковые штрих-коды (www.iskanderus.ru), в отличии от графических, позволяют передавать информацию,
изменяемую в зависимости от состояния технического объекта. При этом сохраняются преимущества штрих-кодов, а именно возможность
надежного и быстрого распознавания в условиях шума. В настоящее время звуковые штрих-коды получают распространение, например,
используются в бытовых приборах. Однако исследования в этой работе разрозненны и не имеют общих стандартов.
Предлагается протокол для передачи информации в воздушной среде, обладающий свойствами штрих кода.
Работа протокола происходит на нескольких уровнях, обладающих своей структурой и системой представления данных:
Физический уровень – передача данных в воздушной среде посредством звуковых
волн. Для представления данных используются звуки опреде-ленных частот. Последовательная структура таких звуков определяет
передаваемое сообщение.
Представительный уровень – производится кодирование и декодирования байт
данных. При передаче исходные данные преобразуются в звуковую последовательность, генерируется звуковая дорожка для
воспроизведения. Во время приема осуществляется анализ звукового сообщения с преоб-разованием его в последовательность байт
информации. На данном уровне осуществляется основной функционал протокола. При декодировании сообщения необходимо использовать
методы цифровой обработки сигнала и систему распознавания звукового сообщения. Реализован алгоритм распознавания звукового
сообщения.
Прикладной уровень – осуществляется преобразование байт данных в
передаваемые структуры и обратно. К примеру, для текста это представление байт в строку в соответствии с определенной
кодировкой (в данной работе использовалась однобайтная кодировка ISO8859-5).
Структура кода такова, каждому байту информации
противопоставляется последовательность из трех частот, представленных в определенном порядке. Эти частоты в свою очередь выбираются из двадцати основных, четыре из которых
являются базовыми (четыре первые низкие частоты). Частоты представлены в таблице:
Базовые частоты (Гц)
Частоты основного набора Гц)
1000
1300
1400
1500
1600
1650
1700
1750
1800
1850
1900
1950
2000
2050
2100
2150
2200
2250
2300
2350
При составлении последовательности сначала выбирается первый базовый компонент,
затем два не базовых. Таким образом, набор из трех частот кодирует один байт информации. Из всех наборов сообщения генерируется
сигнал, который в дальнейшем воспроизводится. Базовый набор частот используется при анализе для того, чтобы можно было четко
разделять последовательности, отвечающие за определенные символы.
Разработчик проекта:Антонов Антон Анатольевич
Научный руководитель: А.Н.Сёмочкин
Адаптивный информационный терминал с функцией распознавания лиц
В БГПУ разработан информационный терминал, предоставляющий студентам и преподавателям информацию о расписании занятий на текущую дату.
В обычном режиме пользователь может выбрать учебную группу из списка и получить ее точное расписание.
Для ускорения процесса можно воспользоваться специальным QR-кодом, соотнесенным с конкретной группой
или преподавателем, продемонстрировав его перед видеокамерой терминала.
QR-код можно получить при выборе группы, он отображается на экране и его можно сфотографировать на смартфон,
также его можно получить с любого компьютера внутренней сети университета и распечатать на принтере.
Терминал оснащен функцией распознавания лиц. Обладая уникальным QR-кодом можно получить доступ к режиму обучения распознаванию лиц.
Имеется возможность сопоставления часто используемой услуги терминала с событием опознавания для конкретного пользователя.
После обучения, достаточно подойти к терминалу и, после успешного распознавания, пользователю будет предъявлено его расписание на текущую дату.
На видео представлены режим обучения распознаванию лиц и режим эксплуатации функции распознавания лиц.
Разработчики проекта: Сёмочкин Александр Николаевич, Антонов Антон Анатольевич,Попов Максим Эдуардович,Мещеряков Дмитрий Андреевич,Евстифеев Дмитрий Валерьевич,Косов Роман Николаевич,
Фурсов Владислав Валерьевич,Юшан Кирилл Анатольевич
Научный руководитель: А.Н.Сёмочкин
Система управления жестами
Разработана система, которая позволяет в реальном времени управлять компьютером
и программными средствами посредством жестов. При этом взаимодействие с компьютером производится с помощью обычной web или
IP камеры и не требует дополнительных технических средств. Программа получает кадры с камеры, которые представляют
собой растровые изображения малого качества. На полученных кадрах осуществляется поиск жестов, на их основе строится
цепочка образов, по которой осуществляется суждение о наблюдаемом действии.
Для работы программы создаётся алфавит жестов, из которых в
дальнейшем составляются предложения, связываемые с реакциями программы. Интерфейс управления жестами может
интегрироваться в другие системы, путем создания модулей адаптированных под конкретные задачи и монтируемых
со сторонними программными или техническими средствами.
В данной работе к задаче управления жестами применена
технология узнавания образов Tempjunct (Iskanderus Visus), разработанная А.Н.Сёмочкиным.
Разработчик проекта:Антонов Антон Анатольевич
Научный руководитель: А.Н.Сёмочкин
Распознавание двумерных маркеров для дополненной реальности
Проект разрабатывается с целью создания программы
позволяющей работать с дополненной реальностью с использованием двумерных маркеров.
На текущей стадии в проекте реализованы: поиск,
распознавание и идентификация маркеров. Данный проект развивается самостоятельно, без использования
сторонних библиотек, они использованы только для захвата изображения с камеры. Весь функционал
программы написан на языке программирования Java.
Разработчик проекта:Черепкова Ольга Константиновна
Научный руководитель: Е.Ф. Алутина
Интерфейс управления компьютерной средой на основе анализа изображений
Проект реализован путем организации взаимосвязанного функционирования ряда технических устройств,
работающих под управлением программы, основанной на использовании технологии анализа изображений.
Компоненты технического обеспечения системы выполняют следующие функции:
- персональный компьютер является в системе объектом управления и одновременно платформой для программного обеспечения, необходимого для работы комплекса;
- мультимедийный проектор служит средством отображения информации, позволяет пользователю наблюдать за работой компьютера и видеть реакцию объекта управления на подаваемые команды;
- web-камера снимает и передает на обработку программному обеспечению проецируемое изображение экрана компьютера и работающего с ним с помощью указки пользователя;
- световая указка является устройством ввода данных, обеспечивающим возможность подавать команды удобным для пользователя способом.
Схема световой указки
Схема взаимодействия аппаратных компонентов системы
Программное обеспечение системы координирует действия аппаратных компонентов и организует их взаимосвязанную непрерывную работу, реализуя следующие функции:
- получение и обработку кадров с цифровой видеокамеры с целью определения характеристик используемого маркера;
- распознавание образа маркера и определение его координат на изображении, полученном с видеокамеры;
- проекцию найденных на изображении координат маркера в координаты на экране компьютера;
- позиционирование указателя мыши в соответствии с определенными координатами;
- имитацию одиночного и двойного щелчков левой кнопки мыши.
Разработанный программно-аппаратный комплекс позволяет пользователю осуществлять интерактивное взаимодействие с компьютером через удобный и простой в использовании интерфейс, который совместно с набором необходимых прикладных программ может использоваться в системе образования в качестве недорогого аналога интерактивной доски.
Разработчик проекта: Федченко Алисия
Научный руководитель: А.Н.Сёмочкин
Целью проекта является создание беспроводного устройства ввода для ПК с предоставлением кроссплатформенного драйвера.
Также предлагаются образцы типовых приложений, использующих это устройство ввода.
Обрабатывая движения рук пользователя, устройство позволяет, например,
организовать такие манипуляции визуальными объектами (изображениями, видеороликами) на большом экране,
как перемещение объектов, изменения масштаба объекта, повороты вокруг оси и т.д.
Проект использует технологию Sun SPOT.
Проект состоит из двух основных частей:
1. Аппаратная часть представляет собой сенсо-моторные перчатки с устройствами Sun SPOT и
наборами системных и пользовательских кнопок на четырех пальцах каждой перчатки.
К компьютеру через USB порт подключается базовая станция Sun SPOT.
Обрабатывая данные, поступающие с аккселерометров Sun SPOTов обеих перчаток,
устройство определяет положение рук в пространстве, проецируя положения соответсвующих
каждой руке курсоров на экране компьютера.
Кнопки используются для генерации таких событий, как кнопка зажата, кнопка отпущена и т.д.
2. Программная часть представляет собой кроссплатформенный драйвер - Java-библиотеку,
позволяющую использовать сенсо-моторные перчатки в любых приложениях.
Одна из частей Java-библиотеки должна функционировать на устройстве Sun SPOT на перчатке,
другая является приложением-драйвером, работающим под управлением java машины на персональном компьютере.
Любое приложение, заинтересованное в получении событий от описывамого устройства ввода,
простым способом может подключиться к драйверу и обрабатывать действия пользователя.
Первым примером использования данной технологии является JavaFX приложение,
в котором можно производить различные манипуляции (перенос, вращение, масштабирование) с изображениями
и видео компонентами с использованием сенсо-моторных перчаток.
Вторым примером является C++ приложение, подключаемое к драйверу устройства.
Разработчик проекта: Магда Денис
Научный руководитель: А.Н.Сёмочкин
Проект "Intellectus 1" - автономный колесный робот, самостоятельно объезжающий препятствия.
Принятие решения о направлении движения осуществляется за счет обработки показаний двух датчиков расстояния.
"Мозгом" "Intellectus'a" является встраиваемая система Sun SPOT,
объединяющая датчики расстояния и приводы робота в единую систему,
программируемую с помощью языка высокого уровня Java.
В данном прототипе используются автомобильная
система ультразвуковых датчиков расстояния.
Датчики обнаруживают препятствия на расстоянии от 30 до 200 сантиметров.
В силу того, что автомобильная система позволяет снимать данные с датчиков только в последовательном режиме,
накладываются ограничения на функциональные возможности робота.
Реакция на препятствия программно реализуется следующим статистическим алгоритмом.
На эмпирически определенном интервале времени накапливается статистическая выборка показаний,
поступающих с датчиков.
Затем вычисляются частоты срабатывания конкретного датчика и принимается решение о изменении направления движения.
При разработке второго прототипа данного колесного робота "Intellectus 2" планируется использование
инфракрасных датчиков с возможностью полного контроля из Sun SPOT'a расстояния до объекта.
Подробную информацию можно получить на странице Проекта
или на блоге разработчика проекта Дениса Магда.
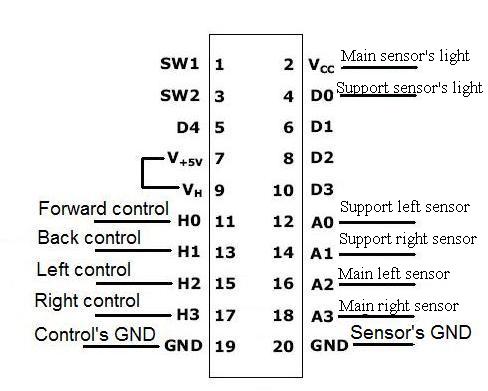
Проект "Line Runner" представляет из себя колёсного робота,
способного двигаться по предварительно заданной траектории.
Траектория для робота - белая полоса шириной от 5-7 сантиметров.
Для движения робота по заданной полосе на нижней части робота были предварительно установлны световые датчики:
2 датчика - основные для поддержания курса,
2 датчика - дополнительные для корректировки курса при схождении робота с траектории.
Для более корректного сбора информации с датчиков, а также для относительной независимости от освещённости в помещении,
около каждого из них были вмонтированы светодиоды, которые осуществляющие освещение под каждым датчиком.
"Мозгом" данного робота является встраиваемая система SunSPOT.
Авторская порграмма для SunSPOT собирает информацию с датчиков, анализирует её и принимает решение о дальнейшей
траектории движения робота,
либо о его остановке, если траектория закончилась.
Схема подключения датчиков к SunSPOT, а также подключение управляющих приводов машины представлена ниже.
Подробную информацию можно получить на странице Проекта.
Разработчик проекта: Мироненко Александр
Научный руководитель: А.Н.Сёмочкин (2009 год)













 Подробную информацию можно получить на
Подробную информацию можно получить на