ARTIFICIAL MUSCLE TWISTER
Designed by Aleksandr Semochkin | Released under CC BY-SA 4.0
Electronics
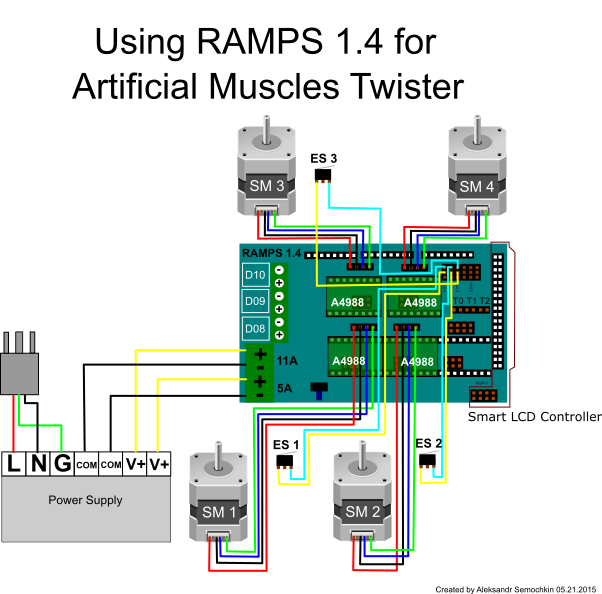
A device uses electronic components similar to ordinary RepRap. Namely, four stepper motors NEMA 17 (holding torque at least 44 N cm); Arduino Mega 2560 controller and expansion card RAMPS 1.4; four stepper motor drivers A4988; three mechanical limit switches; Smart LCD Controller with a four-line LCD screen, controls (angular sensor and buttons), SD card reader, shield cable to connect to RAMPS 1.4; PSU 12 volt 20 amp.
Special Considerations
On the stepper driver board the jumpers need to be installed under each stepper driver to full step.
Inputs
| Components | Pcs |
|---|---|
| Power supply model S-250W-12V. AC input 110/220V. DC output 12 V 20.8A. | 1 |
| A NEMA 17 screw linear stepper motor T8 * 8 42 * 39 300 mm with cable (for 3D printing). | 2 |
| A NEMA 17 stepper motor with a 1.7 x 1.7 inch (43.2 x 43.2 mm) faceplate. | 2 |
|
Mechanical Endstop switch w/ LED indicator (for RepRap 3D Printer Prusa Mendel RAMPS 1.4 or CNC.3X endstop switches/cable. 2.54 mm spacing dupont connector for RAMPS and arduino. LED indicator) |
3 |
|
LCD 2004 Smart Display Controller for RAMPS 1.4 (This Smart Controller contains a SD-Card reader, an rotary encoder and a 20 Character x 4 Line LCD display. Usualy package contains: 1 x LCD 2004 Smart controller. 1 x Connection adapter. 2 x Connection cables.) |
1 |
| Pololu A4988 Stepper Motor Driver Carrier | 4 |
| RAMPS 1.4 Electronics Controller Board for RepRap 3D Printer Mendel Prusa i3. | 1 |
| Arduino Mega 2560 | 1 |
Creative Commons License Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)