ARTIFICIAL MUSCLE TWISTER
Designed by Aleksandr Semochkin | Released under CC BY-SA 4.0
Operations
The device has two general operations: winding the wire on the polymer fiber and twisting the fiber into a helical spring. All functions are available through the control panel.
Modes of device
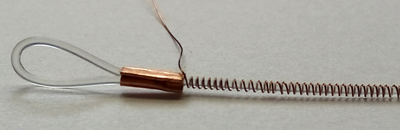
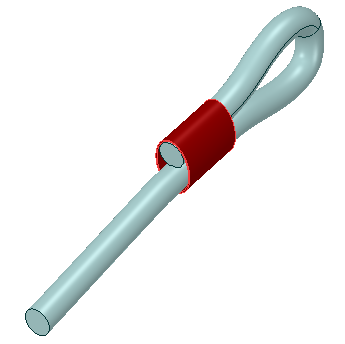 A loop at the end of polymer fiber fixed with a metal pipe |
 The stretching a sample of precursor polymer fiber |
The nylon thread must be prepared before putting it into the device. You need to cut a piece of fishing line required size (maximum length is 30 cm), and fix loops at the ends of it.
 The stretching a sample of precursor polymer fiber
The stretching a sample of precursor polymer fiber
 A loop at the end of polymer fiber fixed with a metal pipe |
 The stretching a sample of precursor polymer fiber |
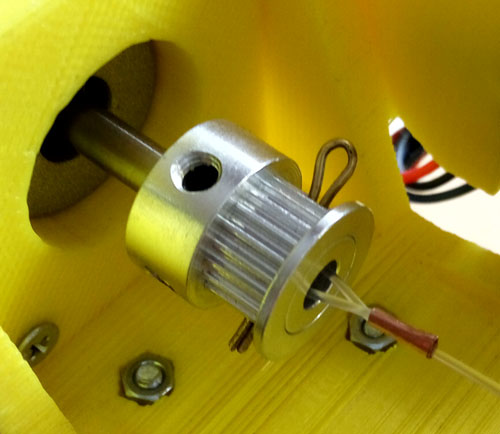
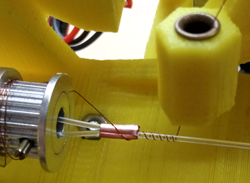
 The winding a metal wire on the polymer fiber
The winding a metal wire on the polymer fiber
The optimum shift mode of SM2 motor for a particular sample type of polymer thread is to be found experimentally.
All the operator’s controlling manipulations on the motor SM2 shift speed are stored in memory and available for further use.
 The twisting of polymer fiber into a tight helical spring (Autocoiling)
The twisting of polymer fiber into a tight helical spring (Autocoiling)
The direction of a wrapping the twisted fiber around a rod determines the type of muscle: contracting or expanding.
The artificial muscle should be placed in an oven and heated slowly for half an hour up to a polymer melting point.
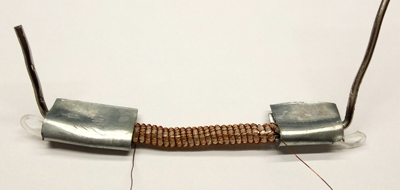 The clamps to prevent unwinding |
 The ready muscle on the rod after being placed in an oven |
 A polymer fiber is twisted before
the formation of coils and wound on a rod
(Mandrel coiling)
A polymer fiber is twisted before
the formation of coils and wound on a rod
(Mandrel coiling)
Creative Commons License Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)